I am Leo Sin (施延庆), a visiting student at Westlake University, Intelligent Spatial Medicine Lab, supervised by Prof. Haoyang Li. I received my M.S. in Computer Engineering from The University of Hong Kong (supervised by Prof. Grantham Pang) and my B.S. in Electrical Engineering from Soochow University (supervised by Prof. Lu Bo).
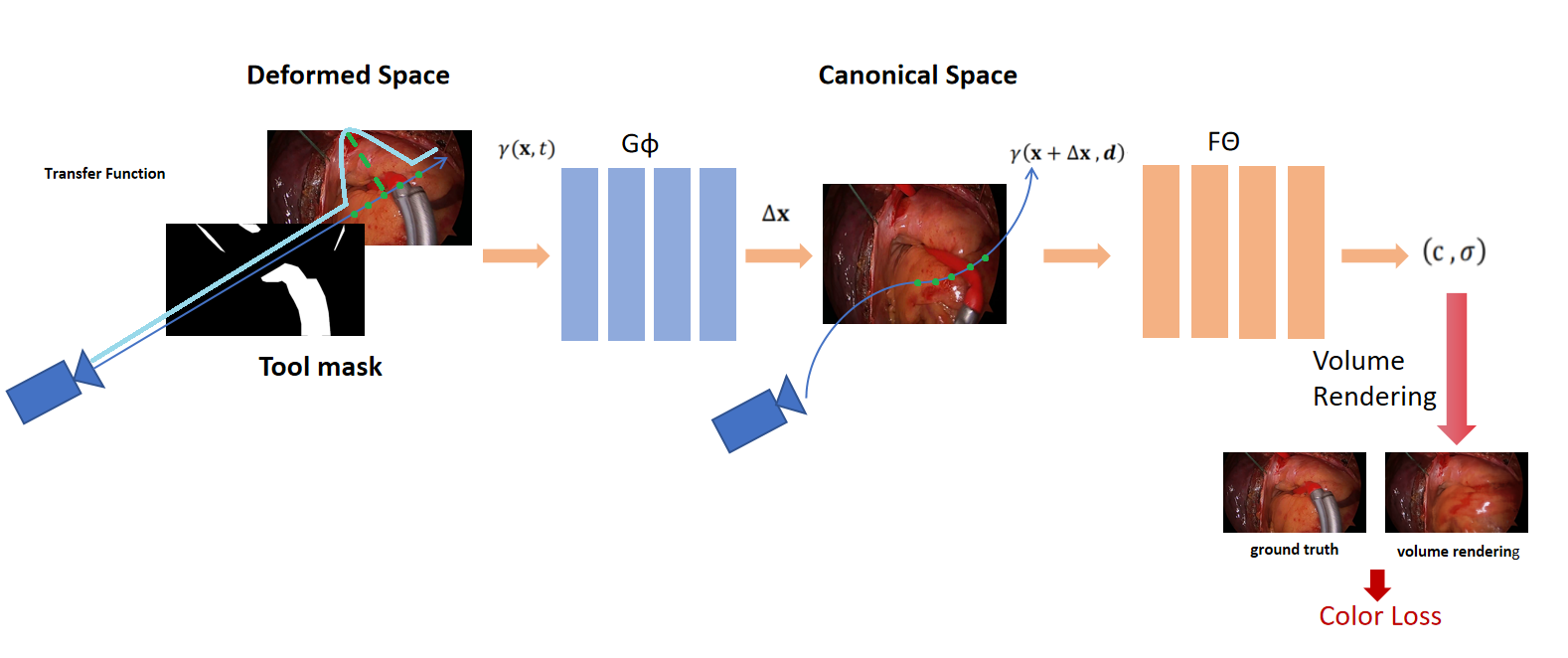
My research focuses on 3D perception for surgical and biomedical scenes, spatial omics, and multimodal AI. I am particularly interested in applying generative AI and 3D reconstruction methods such as NeRF and 3DGS to medical imaging and spatial transcriptomics.
Research Interests: Spatial Omics, 3D Reconstruction (NeRF/3DGS), Multimodal Medical AI, Embodied Intelligence, LLM Agent Systems
Tech Writing & Open Source
I consistently publish technical blogs and workflow notes on Zhihu and Xiaohongshu. Across platforms, I currently have around 130 followers and more than 18,000 total reads.
My recent posts focus on practical AI systems, agent engineering, and research workflows. One representative article is AI Workflow Pipeline, where I summarize how to structure multi-stage AI workflows for real-world development.
I also maintain and open-source several research and agent-system projects:
- LogicVerse: a lightweight and highly decoupled LLM agent framework featuring multi-source configuration, dynamic model factory design, Meta-Agent routing, and a hot-pluggable skill ecosystem.
- AskThenRearrange: an embodied-agent project on robot questioning strategy planning based on KCQ encoding from real human dialogues, validated through user studies and deployed on a Unitree humanoid robot.
News
- 2026.02 Joined Westlake University as visiting student.
- 2026.01 Built Maze Mask at Global Game Jam 2026.
- 2025.12 Started research internship at Tongji University CDI on robot questioning strategies.
- 2025.10 Working on autonomous driving digital twin with 3DGS, CARLA, and Autoware.
- 2025.06 Joined Tab Next (HK) as algorithm engineer intern, developing medical AI chatbot.
Selected Projects
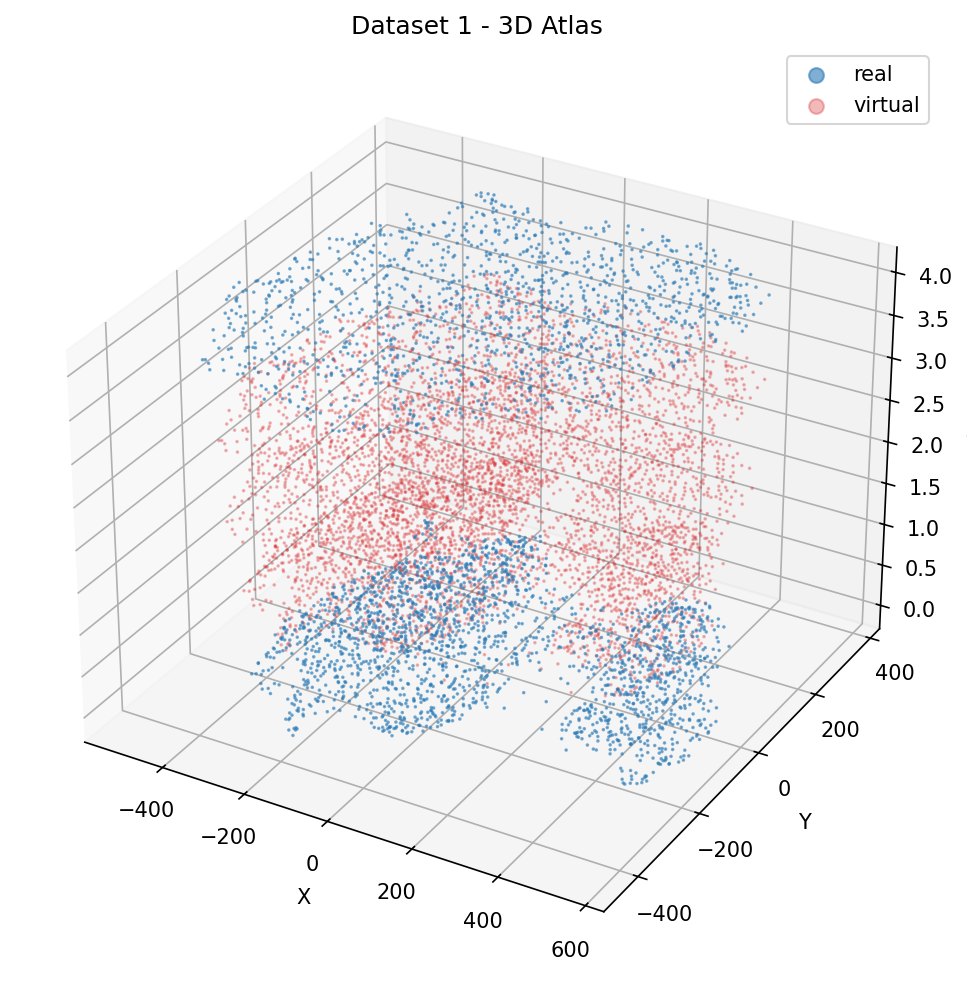
Spatial Omics - 3D Cell Atlas Reconstruction
Core research on 3D virtual slice interpolation for spatial transcriptomics. The goal is to synthesize virtual intermediate tissue slices between real 2D sections and support 3D cell atlas reconstruction.
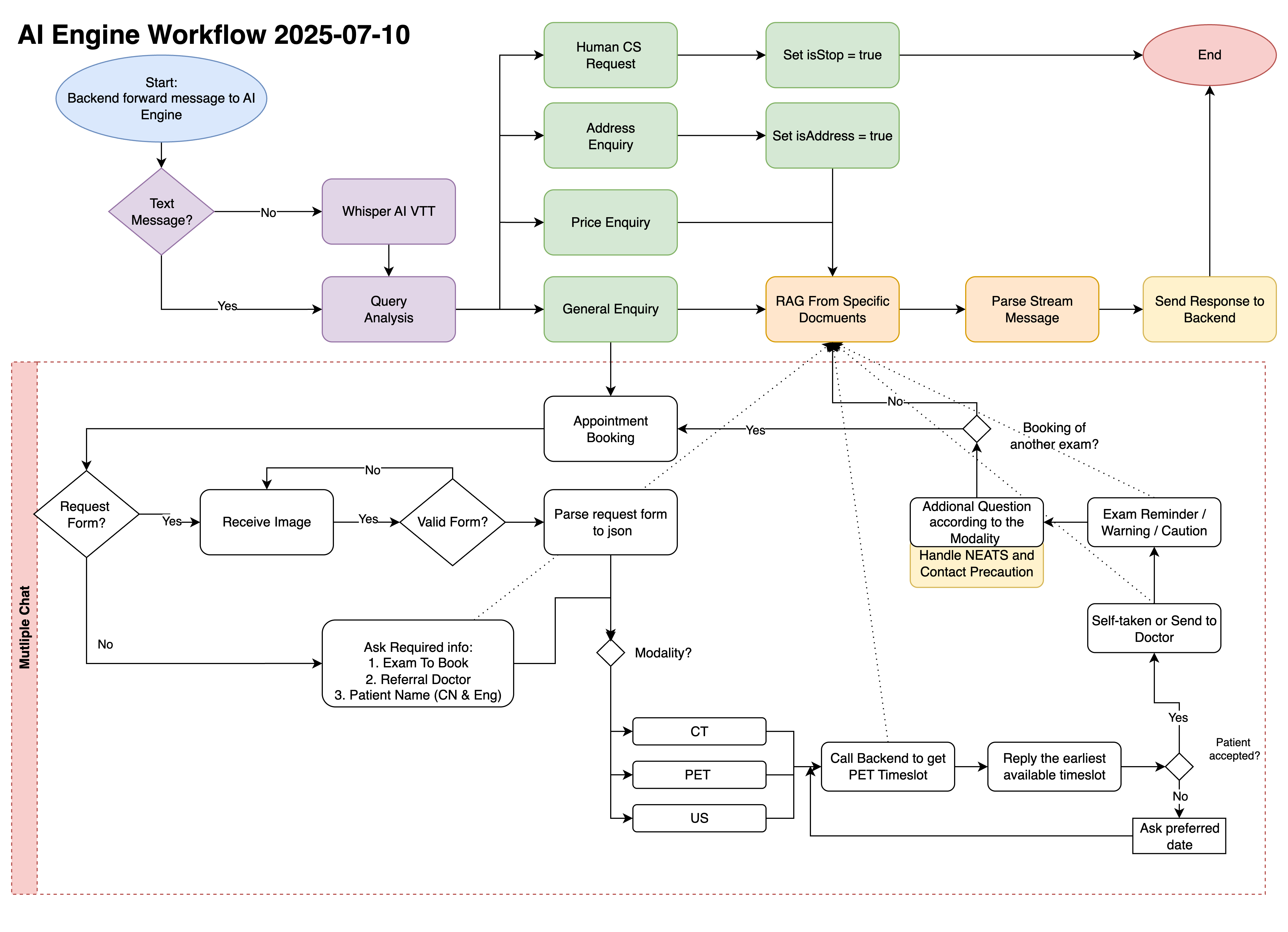
Medical RAG Chatbot - AI Agent for Imaging Center
Built a ReAct agent-based medical chatbot for TST Imaging Center, including retrieval, tool calling, LoRA fine-tuning, and multimodal WhatsApp processing.
AskThenRearrange - Robot Questioning Strategy via KCQ Encoding
Designed robot questioning strategy planning based on KCQ encoding from real human dialogues, and deployed the resulting policy on a Unitree humanoid robot.
GitHub
Autonomous Driving Digital Twin - 3DGS + CARLA/Autoware
Built an Image to COLMAP to 3D Gaussian Splatting reconstruction pipeline and connected it with CARLA simulation for digital twin experiments.

Maze Mask - GGJ2026 Multiplayer Pixel Game
Built a multiplayer online pixel-art game centered on mask power-ups and coin grabbing during Global Game Jam 2026, with contributions in map design, gameplay planning, and mask feature implementation.
Play Online